Volume Tiled Forward Shading
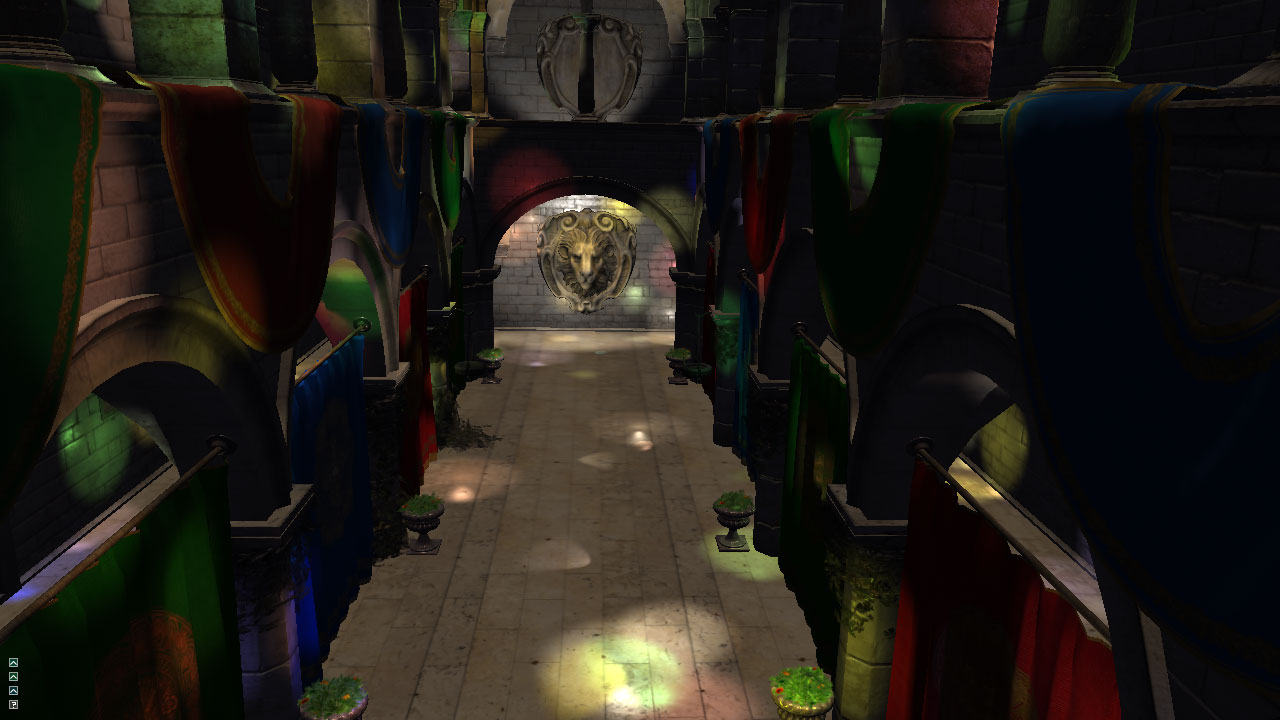
In this post, Volume Tiled Forward Shading rendering is described. Volume Tiled Forward Shading is based on Tiled and Clustered Forward Shading described by Ola Olsson et. al. [13][20]. Similar to Clustered Shading, Volume Tiled Forward Shading builds a 3D grid of volume tiles (clusters) and assigns the lights in the scene to the volumes tiles. Only the lights that are intersecting with the volume tile for the current pixel need to be considered during shading. By sorting the lights into volume tiles, the performance of the shading stage can be greatly improved. By building a Bounding Volume Hierarchy (BVH) over the lights in the scene, the performance of the light assignment to tiles phase can also be improved. The Volume Tiled Forward Shading technique combined with the BVH optimization allows for millions of light sources to be active in the scene.